Сопроводите кватернионы и применяйте к субъектам 3D
Contents
[
Hide
]
Aspose.3D for .NETПозволяет разработчикам объединять два вращения в одно, представленное в кватернионе.
Конкатенатные кватернионы
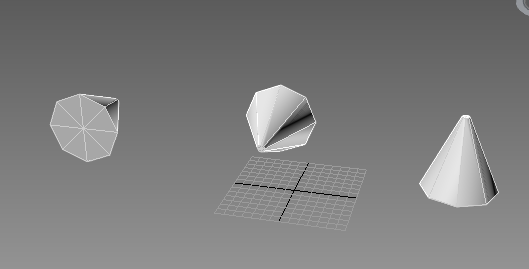
Кватернионы используются для представления ориентации в пространстве 3D. Метод Concat, открытый классом Quaternion, можно использовать для объединения двух кватернионов. В этом примере кода мы объединяем два кватерниона и получаем третий результирующий кватернион, а затем применяем эти три кватерниона к трем цилиндрам.
Образец программирования
Этот пример кода объединяет два кватерниона и применяет их к разным цилиндрам.
Результат в 3ds MAX